Capteur de force 6 axes | ±1kN/±200Nm à ±15 kN/±1,2kNm


- Capteur de force/couple 6 composantes de la série F6D/K6D
- Etendues de mesure: 1kN/200Nm, 5kN/500Nm, 15 kN/1,2kNm
- Classe de précision: 0,2%;
- Signal de sortie: non amplifié
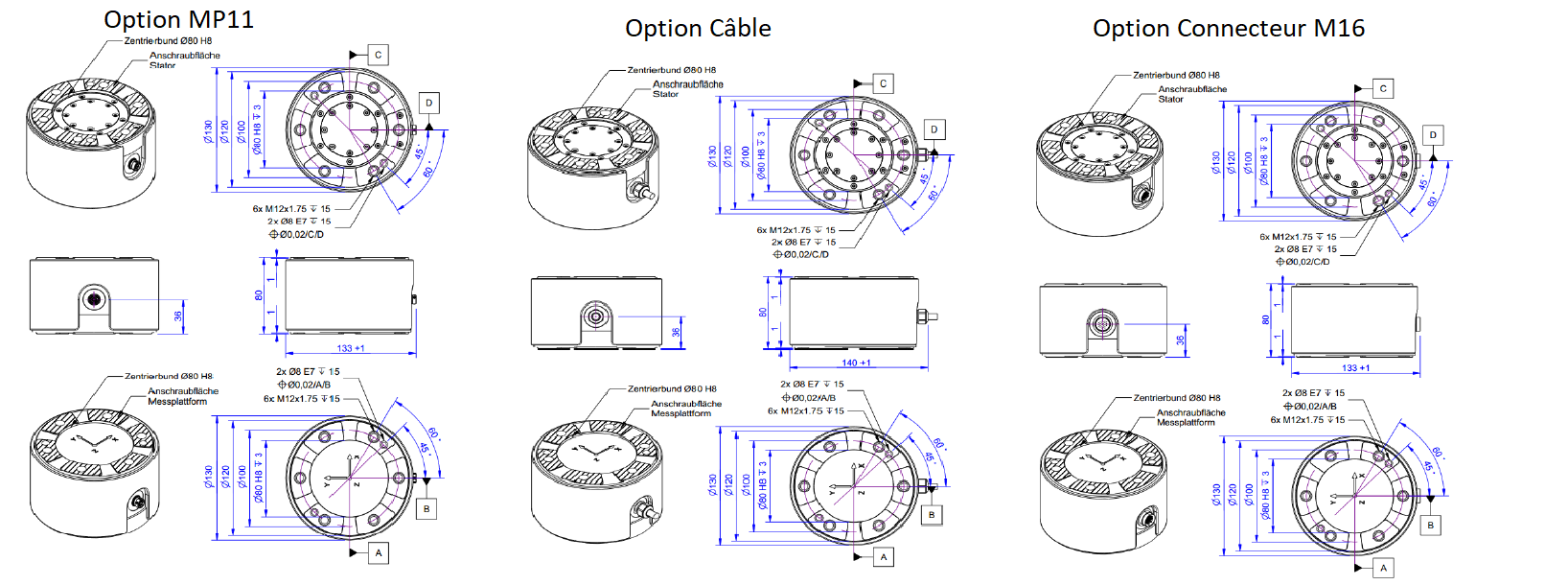
- Dimensions: Ø130 mm x 80 mm;
- Montage et Centrage: 6 x taraudages M12x1.75 + 2 alésages Ø8 mm E7
- Connectique: Connecteur circulaire intégré (MP11), 24-pin, male OU câble 5 m 30-24 PUR/24x0,06 mm2 (CG)
- Construction IP65 en Aluminium ou Inox selon modèles
- Poids: 1,5 à 3,2 kg selon modèle
- Certificat de calibration et matrice intervoies 6x6 fournie
Présentation
Le capteur de force 6 composantes K6D130 mesure en simultané les forces Fx, Fy, Fz et couples Mx, My, Mz sur trois axes perpendiculaires. Les efforts sont mesurés directement à la surface de contact, permettant une rigidité maximale et un encombrement réduit. Les surfaces de contact sont conçues pour une transmission des efforts optimisée, permettant de réduire la non-répétabilité à environ 0,1%, la précision globale à 0,2%, et la sensibilité aux efforts transverses (crosstalk) à environ 1% de la pleine échelle.
Le capteur K6D130 est disponibles en 3 étendues de mesure:
| Modèle | K6D130 (1kN/200Nm) | K6D130 (5kN/500Nm) | K6D130 (15kN/1,2kNm) |
|---|---|---|---|
| Fx, Fy [kN] | 1 | 5 | 15 |
| Fz [kN] | 2,5 | 15 | 50 |
| Mx, My, Mz [Nm] | 200 | 500 | 1200 |
| Connectique | Connecteur MP11 | Connecteur MP11 | Connecteur MP11 |
| Matériau | Aluminium | Aluminium | Acier Inox haute résistance 1.4542 |
Calibration
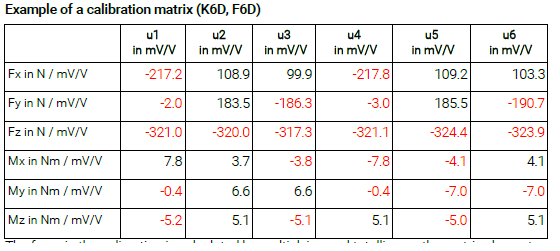
Chaque capteur est livré avec un certificat de calibration usine, ainsi qu'une matrice de couplage intervoies 6x6, identifiée en calibration pour minimiser les influences intervoies (cross-talks)

Les efforts réels sont obtenus en multipliant la matrice de découplage 6x6 (M) par le vecteur I contenant les 6 signaux de sortie du K6D130. L'origine du référentiel dans lequel les efforts mesurés sont projetés est le centre de la surface de contact (voir documentation). Après neutralisation des effets intervoies, un effort appliqué sur un axe résultera en une variation d'effort sur un seul axe. L'exactitude de la mesure est ainsi améliorée d'un facteur 5 à 10.
Plusieurs options de calibration sont proposées (SL/2, SL/4, SL/6, SL/10) permettant d'affiner la calibration aux charges partielles. Une calibration sur une plage réduite est également possible à partir de SL/4.
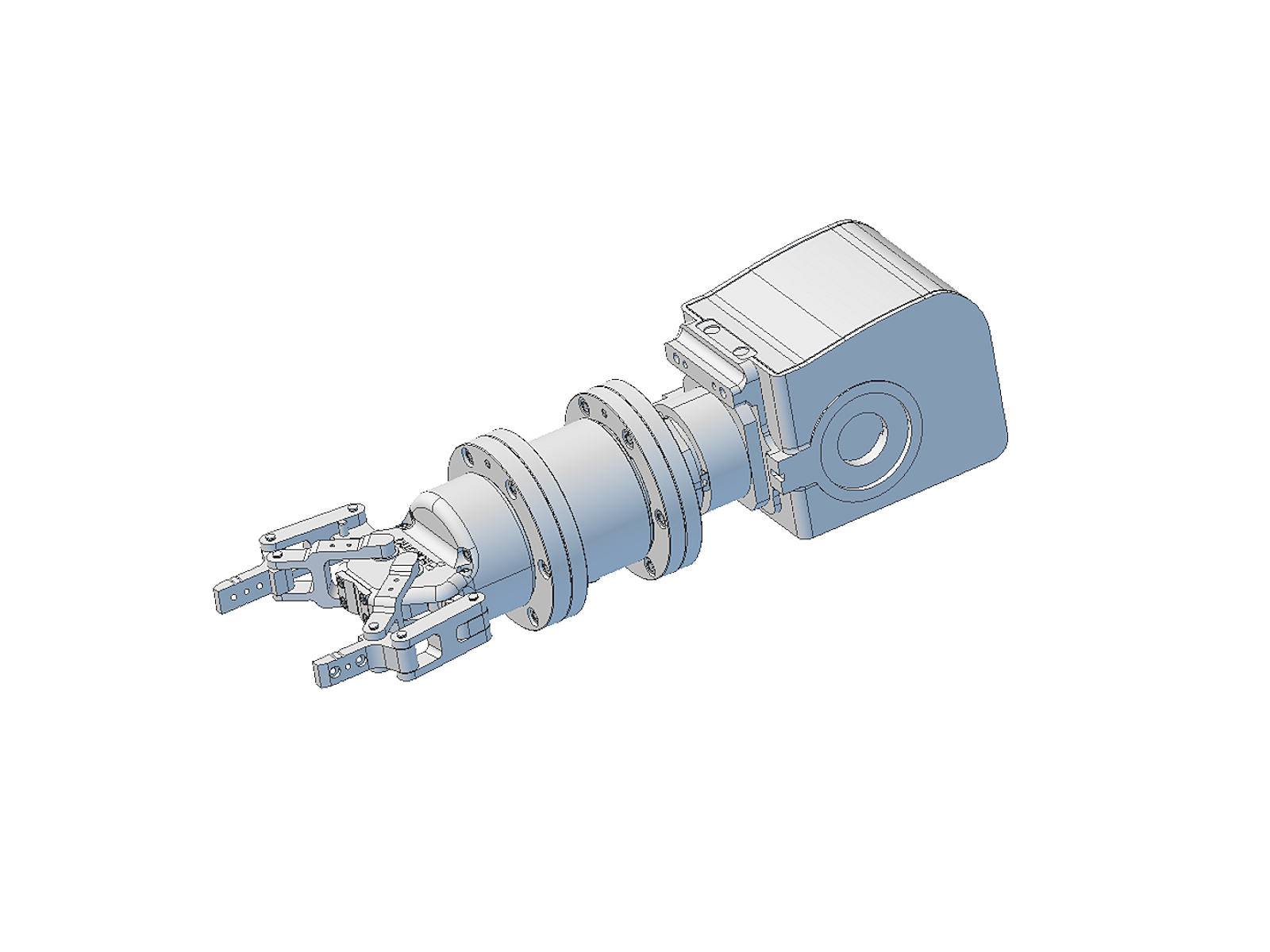
Installation
Le capteur de force 6 composantes K6D130 s'installe aisément sur des machines-outils, des bras, ou des bancs de tests. L'introduction des efforts et la fixation au banc sont réalisée par 6 taraudages M12 x 1.75 de 15mm de profondeurs + 2 pions de contrage Ø8 mm E7 (Couples de serrages: voir ici).
L'application de la force est effectuée sur les portions de surface surélevées de 1 mm. La partie intérieure de la surface est utilisée pour le centrage. La plage de température de fonctionnement est -10 à 85°C.
Chaîne de mesure
Une chaîne de mesure complète pour l'alimentation, la visualisation et l'acquisition des signaux de mesure est configurée selon les besoins spécifiques de l'application.
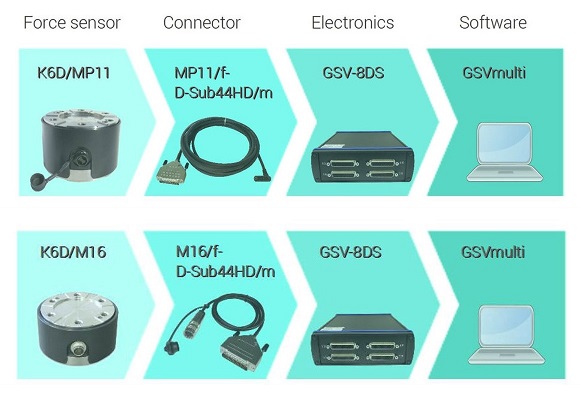
Connectique
Chaque capteur est livré avec un câble de 5m de longueur. La connectique de sortie du capteur est un connecteur miniature MP11. Le connecteur pour raccordement au système d'acqusition est un SUBD44HD. Des adaptateurs sont disponibles pour ressortir ensuite en fils nus, LEMO, SUBD9, SUBD15HD, etc.... Des extensions 6 fils sont également possibles.
Module et logiciel d'acquisition
Les capteurs K6D sont habituellement livrés avec une électronique GSV-8DS et le logiciel d'acquisition GSVmulti. Principales caractéristiques:
- 8 voies analogiques universelles (jauge, thermocouple, +/- 10V, etc...)
- échantillonnage : 48 kHz
- Application en temps réel de La matrice de découplage intervoies
- Interface : USB, RS-232, en option : CAN, WiFi, EtherCAT, LAN, LTE, Blutooth...
- Logiciel de visualisation, d'acquisition Windows 7, 10
Des dll et fichiers VI sont également fournis pour le développement d'une application sous Labview ou en C / Visual Studio / C++ / .net
Applications
Le capteur de force 6 composantes K6D130 est idéal pour les applications en robotique, production, matériau ou médicales telles que
- Détection de collision
- Détection de présence ou d'erreur "Teach-In"
- Fonctionnement contrôlé en force ou en couple
- Mesure du stress en technologie médicale
- technologie orthopédique
- mesures d'analyse de la marche en médecine du sport mesures de confort
- mesures ergonomiques
Options et accessoires
- Calibration standard SL/2, SL/4, SL/6, SL10
- Calibration sur plage réduite
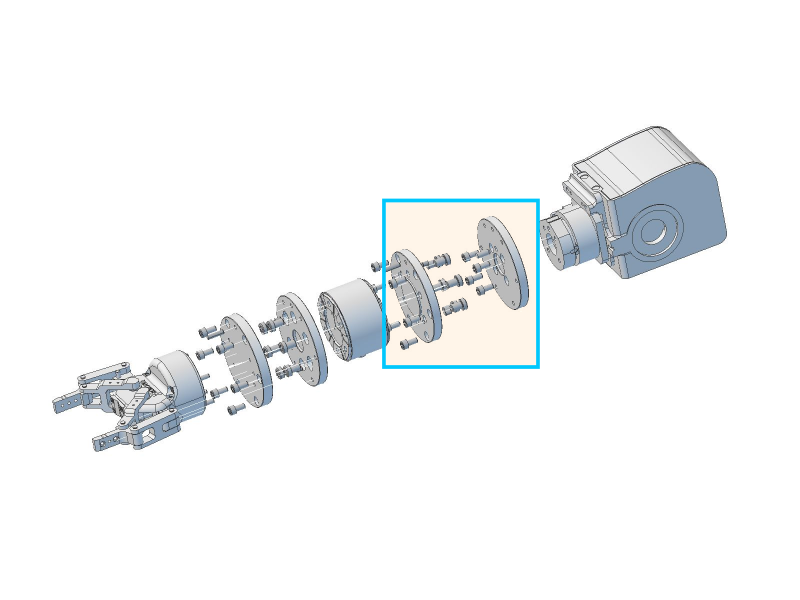
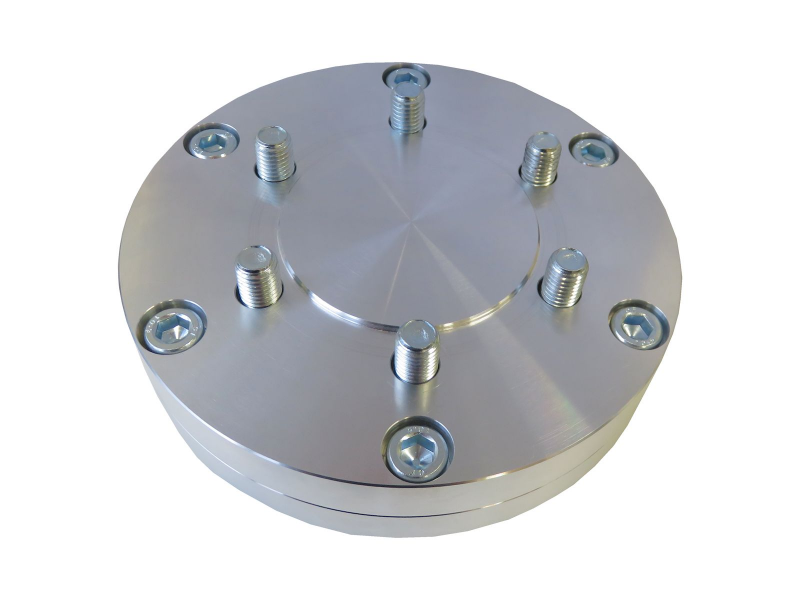
- Kit de montage robotique (norme ISO 9409)

- Câble et connectique pour GSV
- Module de conditionnement et d'acquisition GSV-8DS, GSV-61T6 ou GSV-6BT M8
- Type de capteur
- Capteur 6 axes
- Nombre de composantes
- 6 Axes
- Précision (erreur totale)
- ≤ 0.1 %
- Non linéarité (% PE)
- ± 0.1 %
- Tension d'alimentation
- 10 Vcc
- Direction de mesure
- Traction + Comp.
- Matériau
- Aluminium
- Classe Protection [IPxx]
- IP65
- Poids
- 1500
- Plage d'effort à mesurer
- 250 N - 5 kN, 5kN - 250 kN
- Application
- Robotique

Options et accessoires
- Calibration standard SL/2, SL/4, SL/6, SL10
- Calibration sur plage réduite
- Kit de montage robotique (norme ISO 9409)
- Câble et connectique pour GSV
- Module de conditionnement et d'acquisition GSV-8DS, GSV-61T6 ou GSV-6BT M8
Options et accessoires
- Calibration standard SL/2, SL/4, SL/6, SL10
- Calibration sur plage réduite
- Kit de montage robotique (norme ISO 9409)
- Câble et connectique pour GSV
- Module de conditionnement et d'acquisition GSV-8DS, GSV-61T6 ou GSV-6BT M8
Produits associés

K6D150

GSV-8DS

K6D110 - 6 axes - Ø110 x 60 mm
