Capteur de Force 6 axes - Roue de Moto

- Capacité de charge radiale de 15,5 kN
- Capacité de charge latérale de 5,3 kN
- Capacité de moment de 3,4 kN-m
- Mesure 3 forces et 3 moments
- Système de télémétrie et d'induction sans fil
- Sorties de signaux CAN, analogiques et Ethernet
- S'adapte aux roues de moto de 11" et plus.
- Faible sensibilité transversale
- Compensation de la température
- Enlever la roue sans enlever l'électronique
- Option de location
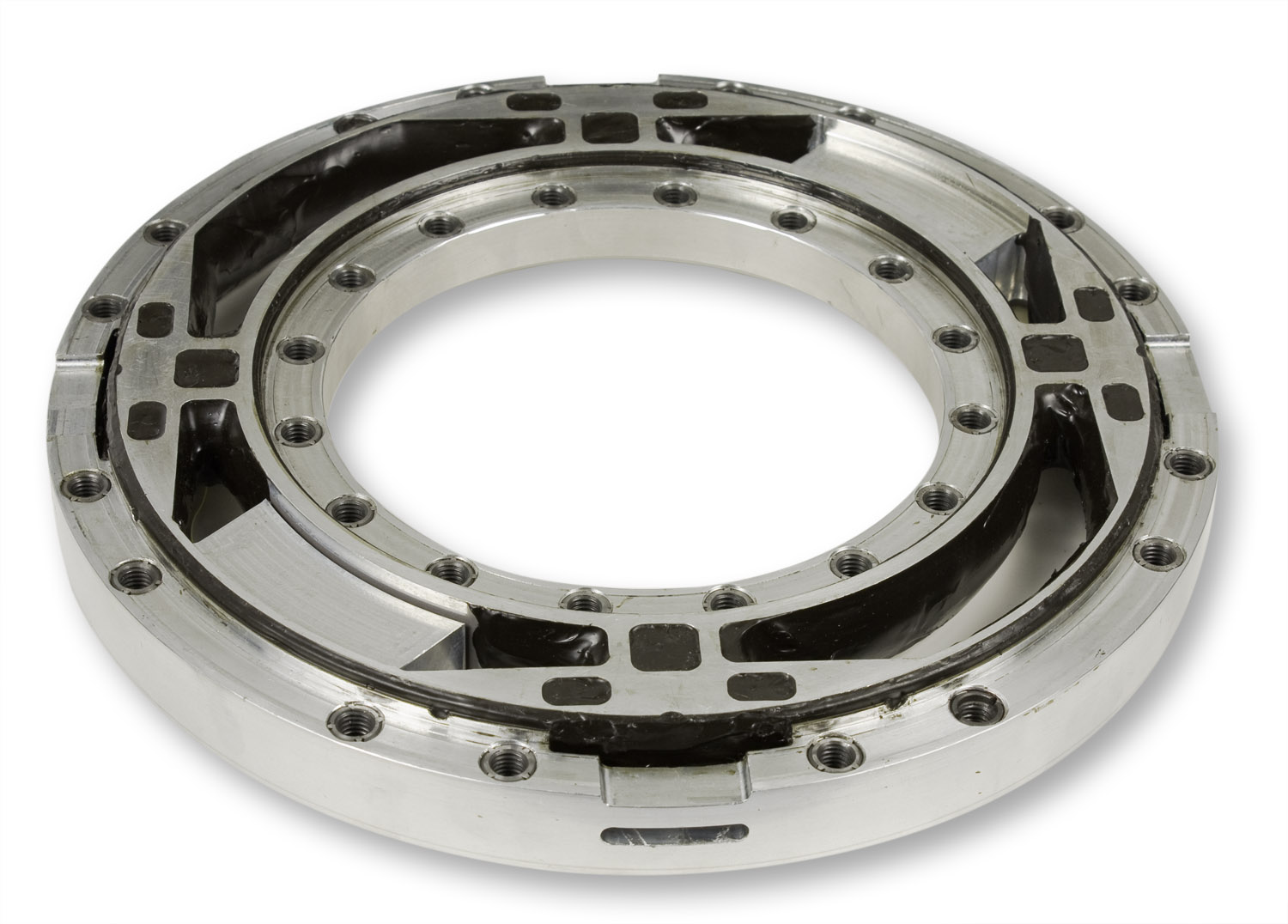
Capteur de force de roue 6 composantes pour moto
Le capteur 6 composantes LW-MC-3.5K à jauges de contraintes mesure finement et en dynamique les 3 efforts Fx, Fy, Fz et les 3 moments Mx, My, Mz à la roue. Ce modèle est spécialement conçu pour une installation sur moto: design fin et compact, étendues de mesure adaptées, et transmission de signal par télémesure. Le capteur est complètement étanche aux intrusions d'eau ou de poussière, et peut donc être utilisé dans toutes les conditions météorologiques.
| Spécification | LW-MC-3.5K |
|---|---|
| Capacité Fx/Fz | 15.5 kN |
| Capacité Fy | 5.3 kN |
| Capacité My | 3.4 kN/m |
| Capacité Mx/Mz | 1.6 kN/m |
| Accélération | +/- 55g |
Transmission du signal et électronique
La mesure d'effort est réalisée par des jauges de contraintes positionnées dans le capteur. Le signal électrique issu de ces jauges est amplifié et transmis par télémesure (sans fil) au module de conditionnement CT2-TEL, qui se charge de transposer les efforts mesurés du centre capteur vers un point de référence moto configurable.
L'alignement du référentiel roue-capteur avec celui de la moto se fait au moyen d'un codeur optique situé dans le capteur qui détermine en temps réel la position de la roue. L'électronique de la télémesure, l'amplificateur du signal de mesure et l'encodeur magnétique sont tous intégrés dans le capteur dans un assemblage discret et robuste.
Le boîtier d'interface du capteur LW-MC-3.5K, le CT2-TEL effectue une transformation des coordonnées en temps réel, corrige les efforts transverses, et délivre les signaux de sortie analogiques (tension 0-10 VDC), CAN ou Ethernet (uniquement pour de la visualisation). Tout le paramétrage est réalisé depuis une simple page Web. Aucun logiciel supplémentaire n'est nécessaire. Dans le cas où deux systèmes sont présents sur la moto, possibilité de synchroniser les deux boitiers CT2 pour une mesure combinée des charges sur les deux pneus.
Installation
l'installation du capteur dynamométrique 6 composantes LW-MC-3.5K se fait à l'aide d'une jante et d'un moyeu usinés pour ce besoin. La conception des pièces d'adaptation est réalisée par Michigan Scientific ou par le client. Idem pour la fabrication. Les pièces d'adaptation ont un rôle important:
- montage du capteur
- equilbrage de la moto
- durabilité et précision de la mesure
Applications
- étude du comportement dynamique
- étude de durabilité
- étude de pneumatiques
- étude de la liaison au sol
- Application
- Moto
- Nombre de composantes
- 6 Axes
- Capacité force radiale (Fx, Fz)
- 15500 N
- Capacité force latérale (Fy)
- 5300 N
- Etendue de mesure couple
- 1600 / 3400 Nm
- Non linéarité (% PE)
- ± 1 %
- Hystérésis
- 0.5 % FS
- Tension d'alimentation
- 10 Vcc
- Montage sur jantes de taille ≥ 11"
- Versions haute température
- Adaptation des étendues de mesure
- Adaptation pour utilisation sur banc à rouleaux
- Pièces d'adaptation sur la moto
Produits associés

LW-2T-20K

LW12.8-50

LW12.8-50-TEL
