Capteur de force 6 composantes - robotique - 20 N / 1 Nm

- Capteur de force/couple 6 composantes de la série F6D/K6D
- Capacité Fx/Fy: 20 N, Fz: 50 N
- Capacité Mx/My/Mz: 1 Nm
- Pour instrumentation robotique industrielle selon norme DIN EN ISO 9409-1
- Classe de précision: 1%;
- Signal de sortie: non amplifié
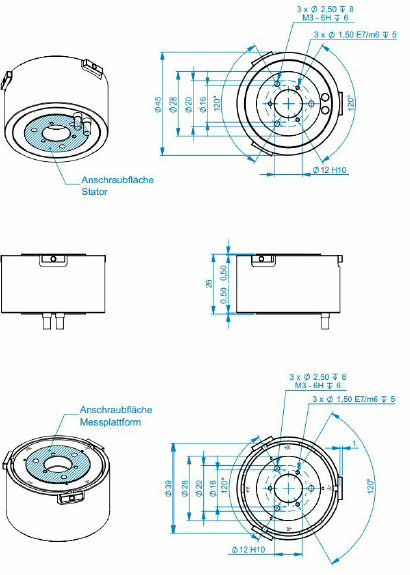
- Dimensions: Ø45 mm x 26 mm;
- Montage: 3 x taraudages M3 + 3 pions de centrage Ø1,5 mm E7
- Connectique: câble 3 m 30-24 PUR/24x0,06 mm2 (CG)
- Construction IP65 en Aluminium
- Poids: 50g
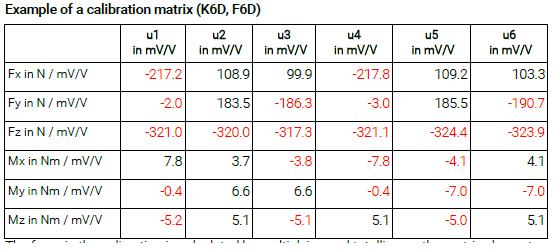
- Certificat de calibration et matrice intervoies 6x6 fournie
Présentation
Le capteur de force 6 composantes F6D45 mesure en simultané les forces Fx, Fy, Fz et couples Mx, My, Mz sur trois axes perpendiculaires. Le capteur F6D45 intègre 6 capteurs de force à jauges de contrainte indépendants ainsi que des brides de montage conformes à la norme DIN ISO 9409-1 pour le montage direct sur le bras d'un robot manipulateur, sans autre bride ni adaptateur. L'encombrement total sur le bras du robot est donc bien inférieur à celui de la série K6D.
L'étendue de mesure du F6D45 est de 20N sur Fx/Fy, 50N sur Fz, et de 1 Nm en Mx/My/Mz. Les efforts sont mesurés directement à la surface de contact, permettant une rigidité maximale et un encombrement réduit. Les surfaces de contact sont conçues pour une transmission des efforts optimisée, permettant de réduire la précision globale à 1% (après découplage), et la sensibilité aux efforts transverses (crosstalk) à 1%.
Chaque capteur est livré avec un certificat de calibration usine, ainsi qu'une matrice de couplage intervoies 6x6. Une calibration sur des étendues de mesure spécifiques est proposée en option, ainsi qu'une calibration ISO-17025.
Installation
Le capteur de force 6 composantes F6D45 se monte sur le bras d'un robot sans autre pièce de montage.
L'introduction des efforts et la fixation au banc sont réalisée par 3 taraudages M3 + 3 pions de centrage Ø1,5 mm E7. L'application de la force est effectuée sur les portions de surface surélevées de 1 mm. La partie intérieure de la surface est utilisée pour le centrage.
Le capteur est alimenté en 5 VDC. La plage de température de fonctionnement est -10 à 85°C. Le signal de sortie est non amplifié. Le capteur est livré avec un câble de 3m.
Conditionnement, Acquisition, Utilisation de la matrice de découplage
L'acquisition des signaux de mesure bruts se fait au choix avec :
- un système d'acquisition PC ou automate programmable équipé d'une carte entrées ponts de jauges
- ou via un module de conditionnement pour pont de jauges à sortie analogique ou numérique, puis d'un PC ou un système d'acquisition standard.
La matrice de découplage intervoies est implémentée dans le module de conditionnement ou d'acquisition.
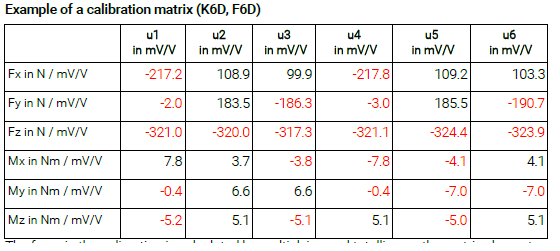
Les efforts réels sont obtenus en multipliant la matrice de découplage 6x6 (M) par le vecteur I contenant les 6 signaux de sortie du F6D45. L'origine du référentiel dans lequel les efforts mesurés sont projetés est généralement le centre de la surface de contact (voir documentation). Après neutralisation des effets intervoies, un effort appliqué sur un axe résultera en une variation d'effort sur un seul axe. L'exactitude de la mesure est ainsi améliorée d'un facteur 5 à 10.
PM Instrumentation recommande pour leur simplicité d'utilisation, leur précision et leur prise en compte des matrices de découplage les modules de conditionnement à interface numérique de la série GSV :
- le GSV-8DS (Module haute performance, 8 entrées analogiques) ou sa version durci GSV-8AS, pouvant être équipé en option d'un datalogger
- le GSV-6LTE, équipé d'un datalogger et d'une connectivité sans fil Un logiciel de visualisation et d'acquisition est inclus avec ces modules (GSV-multi). Des dll et fichiers VI sont également fournis pour le développement d'une application sous Labview ou en C / Visual Studio / C++ / .net
Applications
Le capteur de force 6 composantes F6D45 est idéal pour les applications en robotique, production, matériau ou médicales telles que
- Détection de collision
- Détection de présence ou d'erreur "Teach-In"
- Fonctionnement contrôlé en force ou en couple
Options et accessoires
- Calibration: Standard ou spécifique, ISO-17025
- Câble et connectique pour GSV
- Module de conditionnement et d'acquisition GSV-8DS, GSV-8AS ou GSV-6LTE
- Compensation en température étendue
- TEDS
- Type de capteur
- 6 axes robotique
- Nombre de composantes
- 6 Axes
- Précision (erreur totale)
- 1 %
- Non linéarité (% PE)
- ± 0.1 %
- Hystérésis
- 0.1 % FS
- Température utilisation
- -10 à 85 °C
- Sortie analogique
- non-amplifié
- Signal de sortie
- 0.4 mV/V
- Tension d'alimentation
- 5 Vcc
- Direction de mesure
- Traction + Comp.
- Matériau
- Aluminium
- Classe Protection [IPxx]
- IP64
- Poids
- 0.050
- Plage d'effort à mesurer
- ⩽ 250 N
- Application
- OEM, Robotique

- Calibration: Standard ou spécifique, ISO-17025
- Câble et connectique pour GSV
- Compensation en température étendue
- TEDS



